Unscented Kalman-Filter
Einfache Sprache
Der Unscented Kalman-Filter baut auf dem Kalman-Filter auf erlaubt aber Nichtlineare Funktion. Dabei werden diese stochastisch linearisiert durch eine gewichtete Lineare Regression.
Unscented Transformation
Vereinfacht
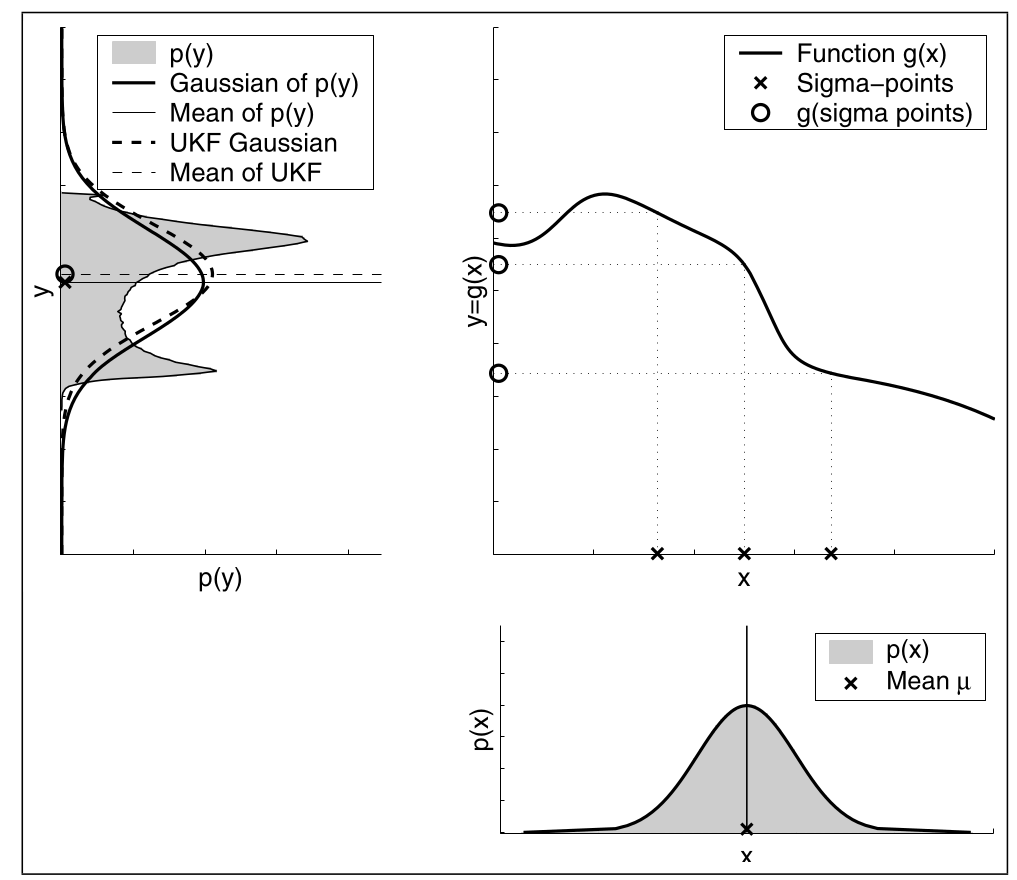
Die Linearisierung durch Unscented Transformation funktioniert vereinfacht wie folgt:
- Es werden sogenannte Sigma-Punkte von dem normalverteilten Belief deterministisch ausgewählt.
- Für jeden Punkt wird eine Gewicht für die Mittelwert-Berechnung und die Kovarianz-Berechnung ermittelt.
- Auf die Sigma-Punkte wird die Nichtlineare Funktion angewendet.
- Die gewichteten Summen der transformierten Sigma-Punkten ist dann der neue Belief.
Generell
Die Sigma-Punkte $\mathcal X^{[i]}$ sind der Mittelwert und symmetrisch entlang der Hauptachsen der Kovarianz. Für einen $n$-Dimensionale multivariate Normalverteilung hat man also $2n+1$ Sigma-Punkte die wie folgt definiert sind
$$\mathcal X^{[0]}= \mathfrak m$$$$\mathcal X^{[i]}= \mathfrak m+\left(\sqrt{(n+\lambda)\mathfrak S}\right)_i\quad \forall i\in \{1,\ldots,n\}$$
$$\mathcal X^{[i]}= \mathfrak m-\left(\sqrt{(n+\lambda)\mathfrak S}\right)_{i-n}\quad \forall i\in \{n+1,\ldots,2n\}$$
wobei $\lambda = \alpha^2(n+\kappa) -n$, mit $\alpha$ und $\kappa$ entscheidet für die Entfernung der Sigma-Punkte vom Mittelwert.
Die zwei gewichte für den jeweiligen Sigma-Punkt, $w_m^{[i]}$ für denn Mittelwert und $w_c^{[i]}$ für die Kovarianz, werde wie folgt berechnet
$$w_m^{[0]} = \frac{\lambda}{n+\lambda}$$$$w_c^{[0]} = \frac{\lambda}{n+\lambda}+(1+\alpha^2+\beta)$$$$w_m^{[i]} = w_c^{[i]} = \frac{1}{2(n+\lambda)}$$
wobei $\beta$ abhängig von der tatsächlichen Verteilung des Beliefs gewählt werden sollte. Ist der Belief perfekt normalverteilt, dann ist $\beta=2$ optimal.
Dann werden die Funktion $g$ auf die Sigma-Punkte $\mathcal X^{[i]}$ angewendet und es ergibt sich $\mathcal Y^{[i]}$.
$$\mathcal Y^{[i]}= g\left(\mathcal X^{[i]}\right)$$Die Parameter des resultierenden Beliefs werden dann als gewichtete Summe von $\mathcal Y^{[i]}$ berechnet:
$$\mathfrak m' = \sum_{i=0}^{2n}w_m^{[i]}\mathcal Y^{[i]}$$$$\mathfrak m' = \sum_{i=0}^{2n}w_c^{[i]}(\mathcal Y^{[i]}-\mathfrak m')(\mathcal Y^{[i]}-\mathfrak m')^T$$
Beispiel
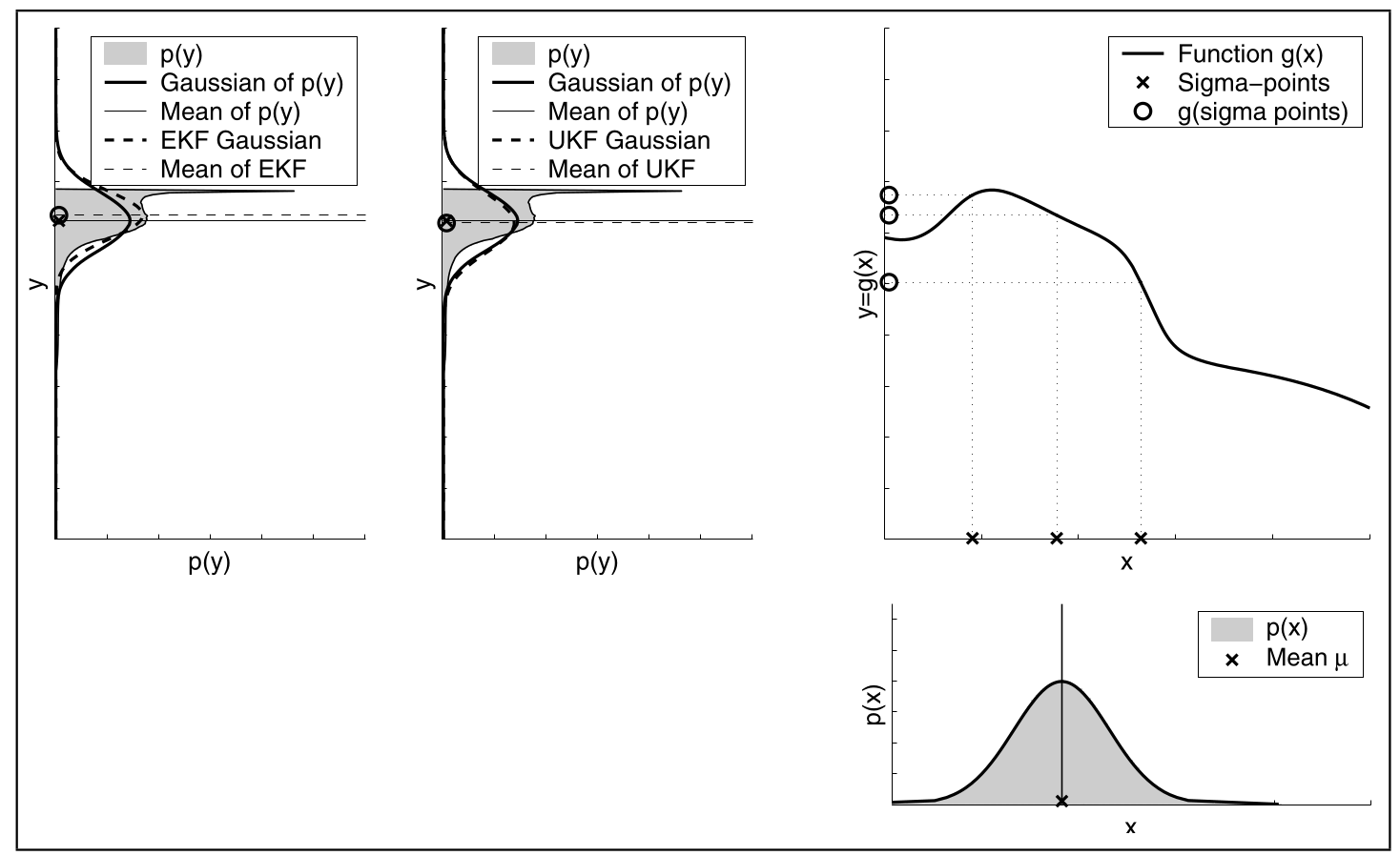
Hier sieht man UKF Transformation im 1-Dimensionalen Raum. Daher gibt es $2\cdot1 +1=3$ Sigma-Punkte.
Vergleich EKF und UKF
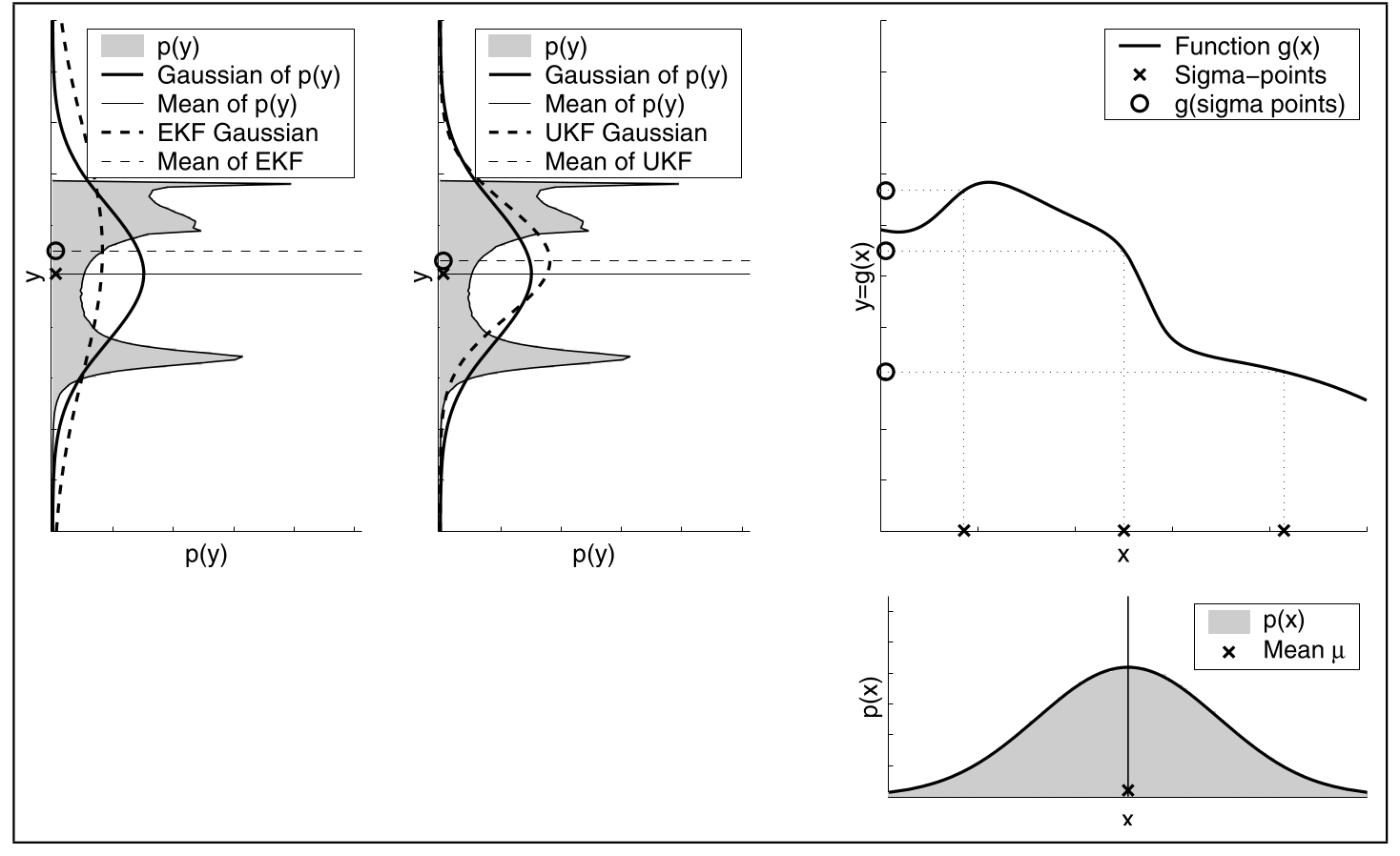
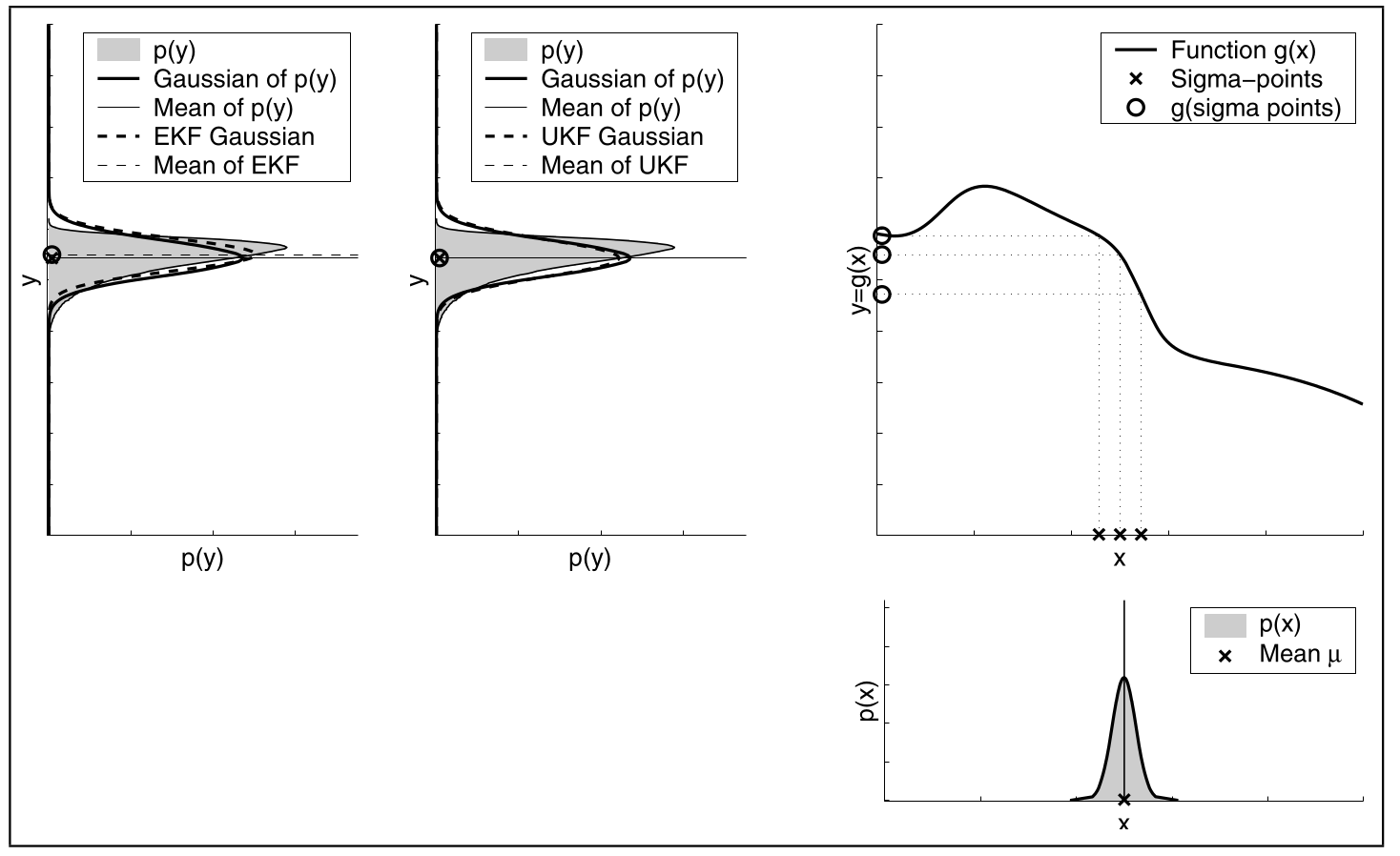
Es wird EKF und UKF verglichen.
Unsicherheit
Hier sieht man, dass UKF besser mit hoher Ungewissheit des Beliefs umgeht.
 Hier sieht man das bei geringer Ungewissheit der Approximationsfehler kleiner wird.
Hier sieht man das bei geringer Ungewissheit der Approximationsfehler kleiner wird.
Nichtlinearität
Hier sieht man das UKF besser mit hoher Nichtlinearität umgehen kann als EKF
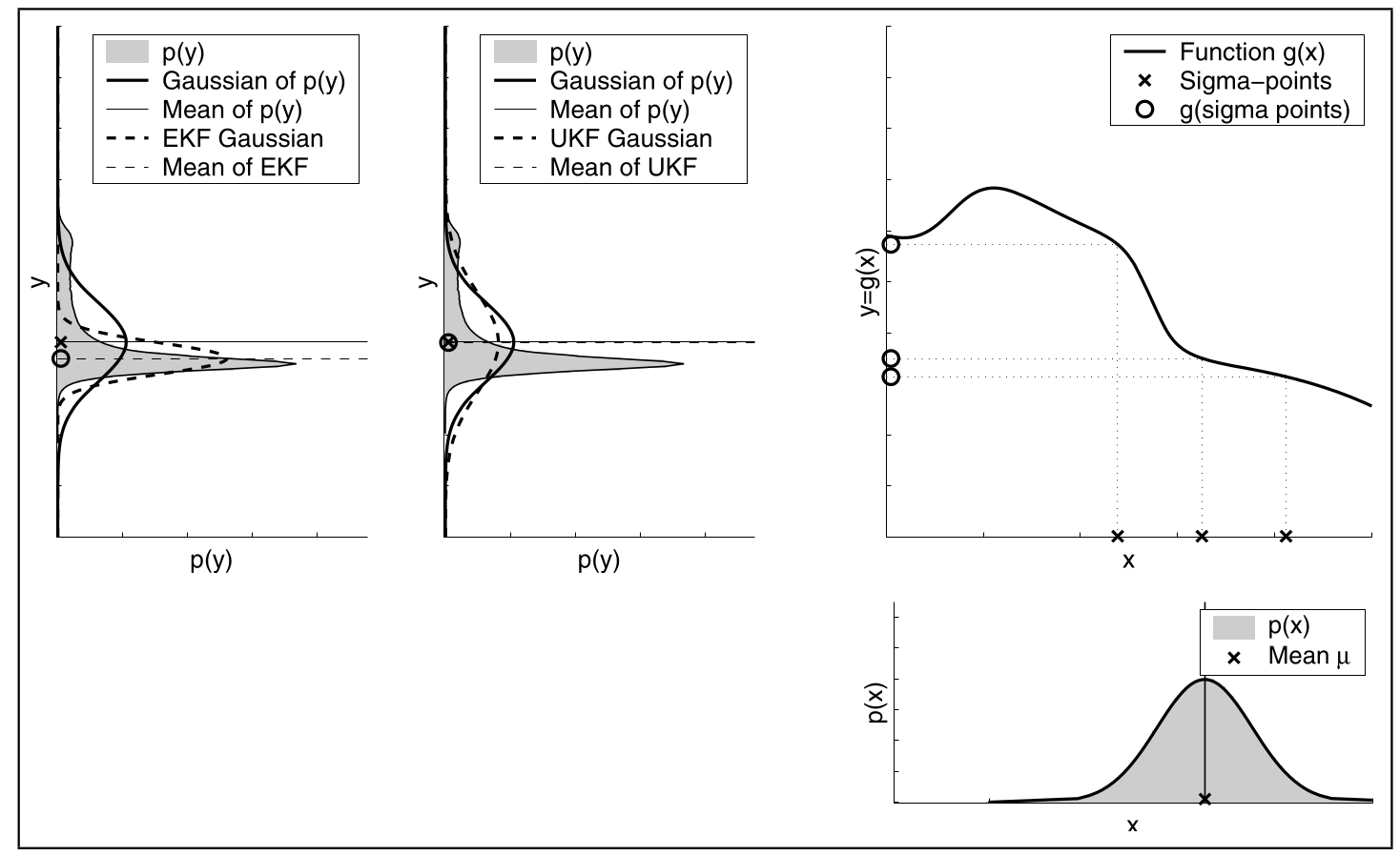 Hier sieht man das UKF auch bei lineareren Funktionen besser ist.
Hier sieht man das UKF auch bei lineareren Funktionen besser ist.
Algorithmus
In Vektor-Schreibweise wird eine Iteration des UKF durch folgenden Algorithmus berechnet:
\begin{algorithm}
\caption{Vektorisierter Unscented Kalman-Filter}
\begin{algorithmic}
\Input Mittelwertvektor $\mathfrak m_{t-1}$, Kovarianzmatrix $\mathfrak S_{t-1}$, Beobachtungsvektor $\mathfrak z_t$, Transitionsvektor $\mathfrak u_t$
\Procedure{vectorized-UFK}{$\mathfrak m_{t-1},\mathfrak S_{t-1}, \mathfrak z_t, \mathfrak u_t$}
\State $\gamma \gets \sqrt{n+\lambda}$
\State $\mathcal X_{t-1} \gets \left( \begin{array}{ccc} \mathfrak m_{t-1} & \mathfrak m_{t-1}+\gamma\sqrt{\mathfrak S_{t-1}} & \mathfrak m_{t-1}-\gamma\sqrt{\mathfrak S_{t-1}}\end{array} \right)$
\State $\mathcal {\bar X}^*_t \gets g(\mathfrak u_t,\mathcal X_{t-1})$
\State $\bar\mathfrak m_t \gets \sum_{i = 0}^{2n}w_m^{[i]}{\mathcal{\bar X}_t^*}^{[i]}$
\State $\bar\mathfrak S_t \gets \sum_{i = 0}^{2n}w_c^{[i]}\left({\mathcal{\bar X}_t^*}^{[i]}-\mathfrak{\bar m}_t\right)\left({\mathcal{\bar X}_t^*}^{[i]}-\mathfrak{\bar m}_t\right)^T+ \mathfrak R_t$
\State $\mathcal {\bar X}_{t} \gets \left( \begin{array}{ccc} \mathfrak {\bar m}_{t} & \mathfrak {\bar m}_{t}+\gamma\sqrt{\mathfrak {\bar S}_{t}} & \mathfrak {\bar m}_{t}-\gamma\sqrt{\mathfrak {\bar S}_{t}}\end{array} \right)$
\State $\mathcal{\bar Z}_t = h(\mathcal {\bar X}_t)$
\State $\mathcal{\bar z}_t = \gets \sum_{i = 0}^{2n}w_m^{[i]}{\mathcal{\bar Z}_t}^{[i]}$
\State $\mathcal S_t \gets \sum_{i = 0}^{2n}w_c^{[i]}\left({\mathcal{\bar Z}_t}^{[i]}-\mathfrak{\bar z}_t\right)\left({\mathcal{\bar Z}_t}^{[i]}-\mathfrak{\bar z}_t\right)^T+ \mathfrak Q_t$
\State $\mathfrak {\bar S}_t^{x,z} \gets \sum_{i = 0}^{2n}w_c^{[i]}\left({\mathcal{\bar X}_t}^{[i]}-\mathfrak{\bar m}_t\right)\left({\mathcal{\bar Z}_t}^{[i]}-\mathfrak{\bar z}_t\right)^T$
\State $\mathfrak K_t \gets \mathfrak {\bar S}_t^{x,z}\mathcal S_t^{-1}$
\State $\mathfrak m_t \gets \bar\mathfrak m_t + \mathfrak K_t\left(\mathfrak z_t - \bar\mathfrak z_t\right)$ \Comment{Messung.}
\State $\mathfrak S_t \gets \bar\mathfrak S_t - \mathfrak K_t \mathcal S_t \mathfrak K_t^T$
\Return $\mathfrak m_t,\mathfrak S_t$
\EndProcedure
\end{algorithmic}
\end{algorithm}
Laufzeit durch $\mathcal O(n^2+k^{2.4})$ begrenzt.