Kartenbasiertes-Bewegungsmodell
Einfache Sprache
Beim Kartenbasiertes-Bewegungsmodell haben wir zusätzlich zur Pose $x_t$ und Aktion $u_t$ die Karte $m$. Das hilft uns den wir nehmen an das dies uns bessere Vorhersagen ermöglicht, also
$$p(x_t\mid u_t,x_{t-1}) \not= p(x_t\mid u_t,x_{t-1}, m)$$
Problem
Um die tatsächliche Wahrscheinlichkeit zu berechnen müsst in betracht gezogen werden ob überhaupt ein Weg zwischen $x_{t-1}$ und $x_t$ möglich ist und das $u_t$ diesen befolgt. !Sehr Komplex!
Lösung
Für geringe Distanzen zwischen $x_{t-1}$ und $x_t$ ist folgende Approximation möglich
$$p(x_t\mid u_t,x_{t-1}, m) = \eta\frac{p(x_t\mid u_t,x_{t-1})p(x_t\mid m)}{p(x_t)}$$wobei
- $\eta$ es zur Wahrscheinlichkeit normalisiert,
- $p(x_{t})$ ist konstant,
- $p(x_t\mid u_t,x_{t-1})$ ist die Wahrscheinlichkeit ohne Karte, z.B. mit Koppelnavigation oder Odometrisches Bewegungsmodell und
- $p(x_t\mid m)$ ist die Wahrscheinlichkeit, die ausdrückt wie konsistent (wie viel Sinn macht) Pose $x_t$ in der Karte $m$ ist.
$p(x_t\mid m)$
In Belegungsgitterkarte ist $p(x_t\mid m) = 0$ genau dann $x_t$ auf der Karte besetzt ist. Sonst ist $p(x_t\mid m)$ ein konstanter Wert.
Sampling und geschlossene Form
\begin{algorithm}
\caption{Kartenbasiertes-Bewegungsmodell}
\begin{algorithmic}
\Input initial pose $x_t$, action $u_t$, hypothesized pose $x_{t-1}$, map $m$
\Procedure{motion-model-with-map}{$x_t, u_t, x_{t-1}, m$}
\return $p(x_t\mid u_t,x_{t-1})\cdot p(x_t\mid m)$
\EndProcedure
\Procedure{sample-motion-model-with-map}{$u_t, x_{t-1}, m$}
\Repeat
\State $x_t \gets$ \Call{sample-motion-model}{$u_t,x_{t-1}$}
\State $\pi \gets p(x_t\mid m)$
\Until{$\pi > 0$}
\return $(x_t,\pi)$
\EndProcedure
\end{algorithmic}
\end{algorithm}
Die Funktionen $\text{sample-motion-model-with-map}$ sind entweder Koppelnavigationssampling oder Odometrisches Sampling.
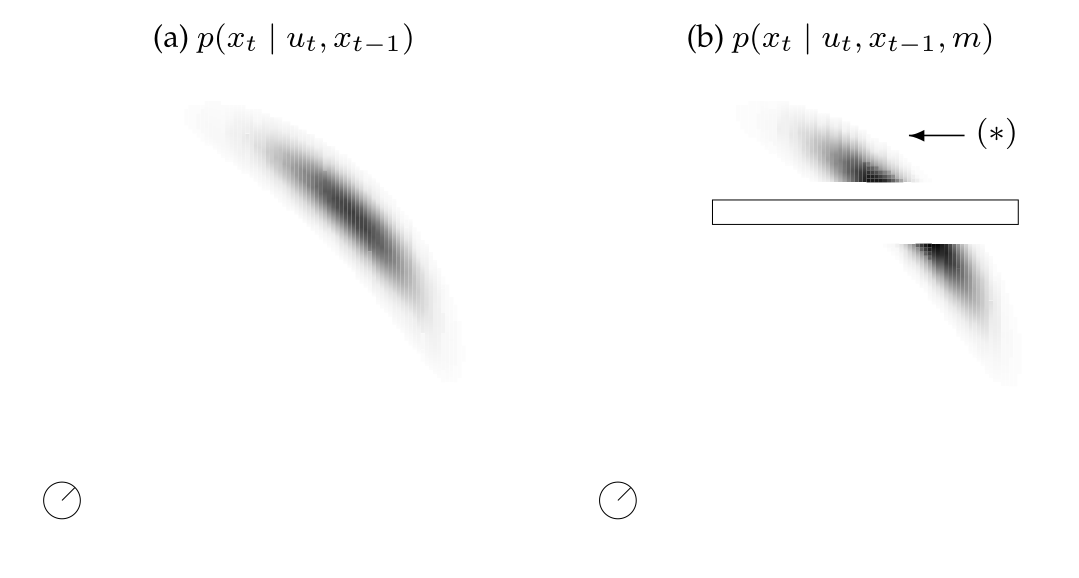
Hier sehen wir bei a) die Wahrscheinlichkeitsverteilung mit Koppelnavigation und bei b) angepasst auf die Karte $m$.