Beam-based sensor model
Einfache Sprache
Die Beam-based sensor model ist ein Wahrscheinlichkeitstheoretische Wahrnehmungsmodelle für Range Finders.
Herleitung
Das Modell berücksichtigt das Modell 4 Fehlerarten:
- Messfehler um das erwartete Objekt herum,
- Messung unerwartete Objekte,
- Verfehlen des erwarteten Objekts und
- zufälliger Messfehler. Die Wahrnehmungswahrscheinlichkeit $p(z_t\mid x_t,m)$ ist somit eine Kombination der 4 Verteilungen (Verteilung) die den jeweiligen Fehler beschreiben.
Begriffe
Sei $z_t^{k*}$ die tatsächliche Entfernung des nähsten Objekts und $z_t^{k}$ die gemessen Entfernung. $z_t^{k*}$ kann in Lagegestützte Karte durch ray casting und in Merkmalgestützte Karte Suche des nähstes Objekts in einem Kegel (Winkel) gefunden werden. Sei $z_\textrm{max}$ die maximale Entfernung die der Senor messen kann.
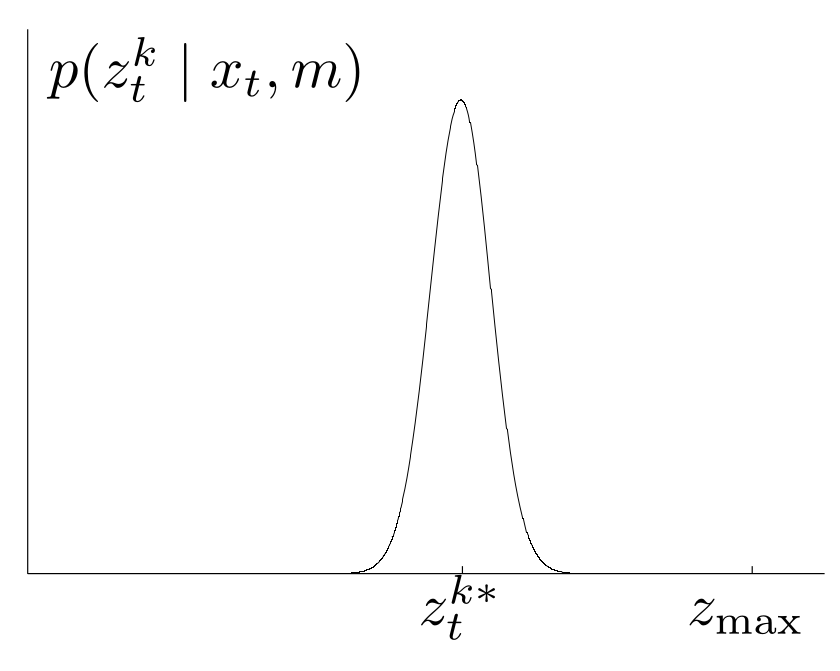
1. Korrekte Messung mit Messungenauigkeit
Da Messungen um die tatsächliche Entfernung kleine Abweichungen aufweist aus verschiedenen Gründen, so z.B. geringe Auflösung des Sensors, wir eine Normalverteilung an mit Erwartungswert $z_t^{k*}$ und Standardabweichung $\sigma_\textrm{hit}$. Wird $z_\mathrm{max}$ beachtet so ergibt sich folgende Verteilung
$$p_\mathrm{hit}(z_t^k\mid x_t,m)=\begin{cases}\eta\,\mathcal N(z_t^k;z_t^{k*}, \sigma_\mathrm{hit}^2)& \mathrm{if}\; 0 \leq z_t^k\leq z_\mathrm{max}\\ 0 & \mathrm{else} \end{cases}$$Hier wird $z_t^{k*}$, wie oben beschrieben, aus $x_t$ und $m$ durch ray casting berechnet. $\mathcal N(z_t^k;z_t^{k*}, \sigma_\mathrm{hit}^2)$ ist die Normalverteilung mit Erwartungswert $z_t^{k*}$ und Standardabweichung $\sigma_\mathrm{hit}$, ausgewertet an der Stelle $z_t^k$. Also
$$\mathcal N(z_t^k;z_t^{k*}, \sigma_\mathrm{hit}^2) = \frac{1}{\sqrt{2\pi\sigma_\textrm{hit}^2}}\exp\left(-\frac{1}{2}\frac{(z_t^k-z_t^{k*})^2}{\sigma_\textrm{hit}^2}\right)$$mit der Normalisierungskonstante
$$\eta = \left(\int_0^{z_\mathrm{max}}\mathcal N(z_t^k;z_t^{k*}, \sigma_\mathrm{hit}^2)\;dz_t^k\right)^{-1}\;.$$
Hier ist eine Beispielverteilung
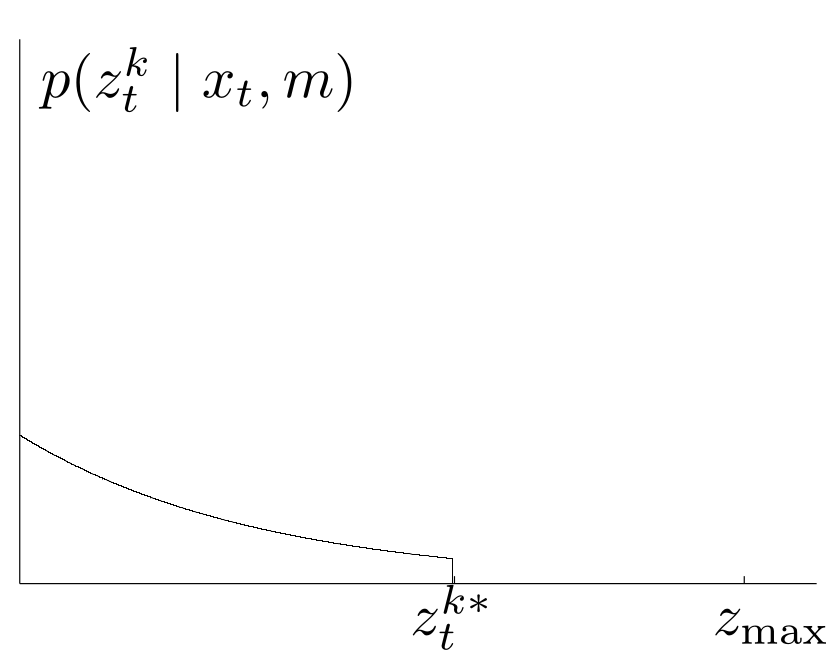
2. Messung unerwarteter Objekte
Hier werden andere bewegliche Objekte, die nicht teil von $m$ sind, berücksichtigt. Diese unmodellierten Objekte haben folgende Eigenschaften:
- Wenn sie vorkommen dann zwischen $0$ und $z_t^{k*}$.
- Die Wahrscheinlichkeit ein unmodelliertes Objekt zu messen nimmt mit der Entfernung ab. (Man stelle sich 2 Personen vor (eine vor der anderen). Dann gibt es 4 Möglichkeiten: 1. keine, 2. nur vordere Person, 3. nur hintere Person und 4. bei Personen. Daraus folgt das 1 mal keine Person, 2 mal die Vordere Person und 1 mal die hintere Person gemessen wird) Die diese Eigenschaften werden durch eine Exponentialverteilung mit Parameter $\lambda_\mathrm{short}$ modelliert. Wobei die Verteilung $p_\textrm{short}$ bei $z_t^{k*}$ abgeschnitten wird (siehe erste Eigenschaft oben). Wir erhalten $$p_\mathrm{short}(z_t^k\mid x_t,m)=\begin{cases}\eta \lambda_\mathrm{short}\exp\left(-\lambda_\mathrm{short} z_t^k\right)& \mathrm{if}\; 0 \leq z_t^k\leq z_\mathrm{max}\\ 0 & \mathrm{else} \end{cases}$$
Die kumulierte Wahrscheinlichkeiten im Interval $[0,z_t^{k*}]$ ist
$$\begin{align}\int_0^{z_t^{k*}}\lambda_\mathrm{short}\exp\left(-\lambda_\mathrm{short} z_t^k\right)\; dz_t^k &= -\exp\left(-\lambda_\mathrm{short}z_t^{k*}\right)+ \exp\left(-\lambda_\mathrm{short}0\right)&\Huge|\normalsize\text{Def. Exponentialverteilung}\\&= 1 -\exp\left(-\lambda_\mathrm{short}z_t^{k*}\right)\\\end{align}$$womit sich die Normalisierungskonstante als
$$\eta=\frac{1}{1 -\exp\left(-\lambda_\mathrm{short}z_t^{k*}\right)}$$ ergibt.
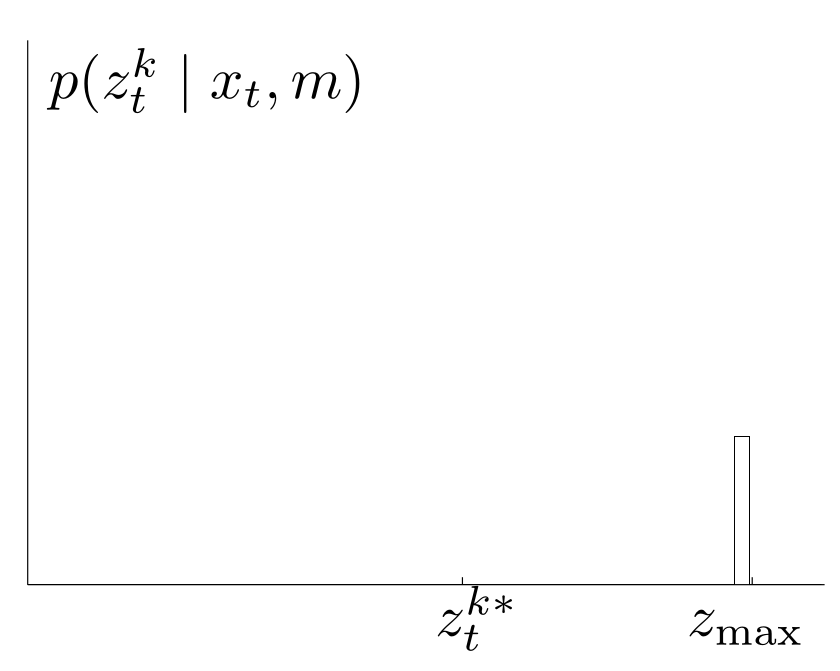
3. Verfehlen
Wird das erwartete Objekt verfehlt, z.B. durch eine Reflexion, ist das Resultat der Wert $z_\textrm{max}$. Zur Modellierung wird eine Indikatorfunktion genutzt die bei $z_\textrm{max}$ ausschlägt. Also
$$p_\mathrm{max}(z_t^k\mid x_t,m)= I(z = z_\textrm{max})= \begin{cases}1& \textrm{if}\; z=z_\textrm{max}\\0&\textrm{else}\end{cases}$$
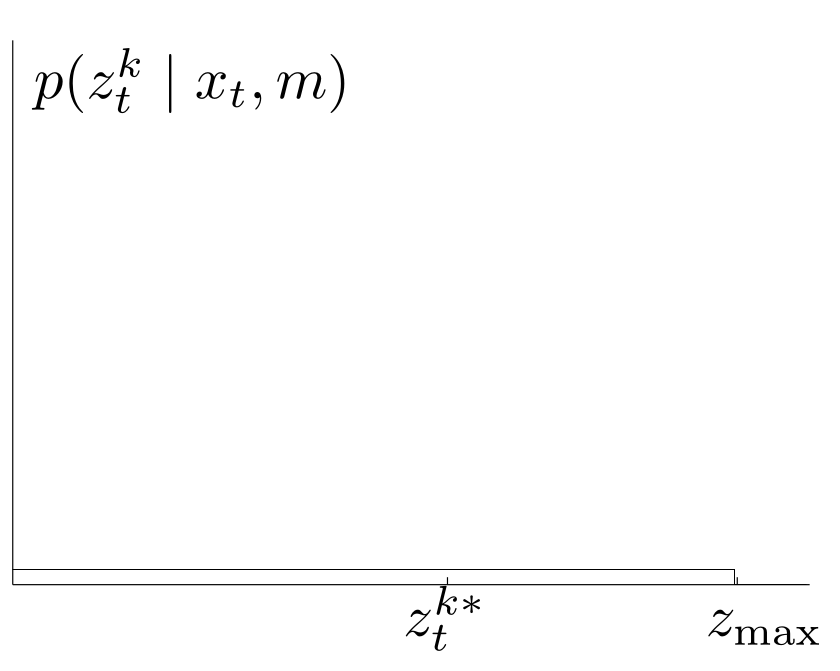
4. Zufällige Messfehler
Diese Kategorie umfällst alle restlichen unerklärlichen Messfehler. Wir modellieren es einfach als Uniformverteilung im Interval $[0,z_\textrm{max}]$
$$p_\mathrm{rand}(z_t^k\mid x_t,m)= \begin{cases}\frac{1}{z_\textrm{max}}& \textrm{if}\; 0\leq z_t^k \leq z_\textrm{max}\\0&\textrm{else}\end{cases}$$
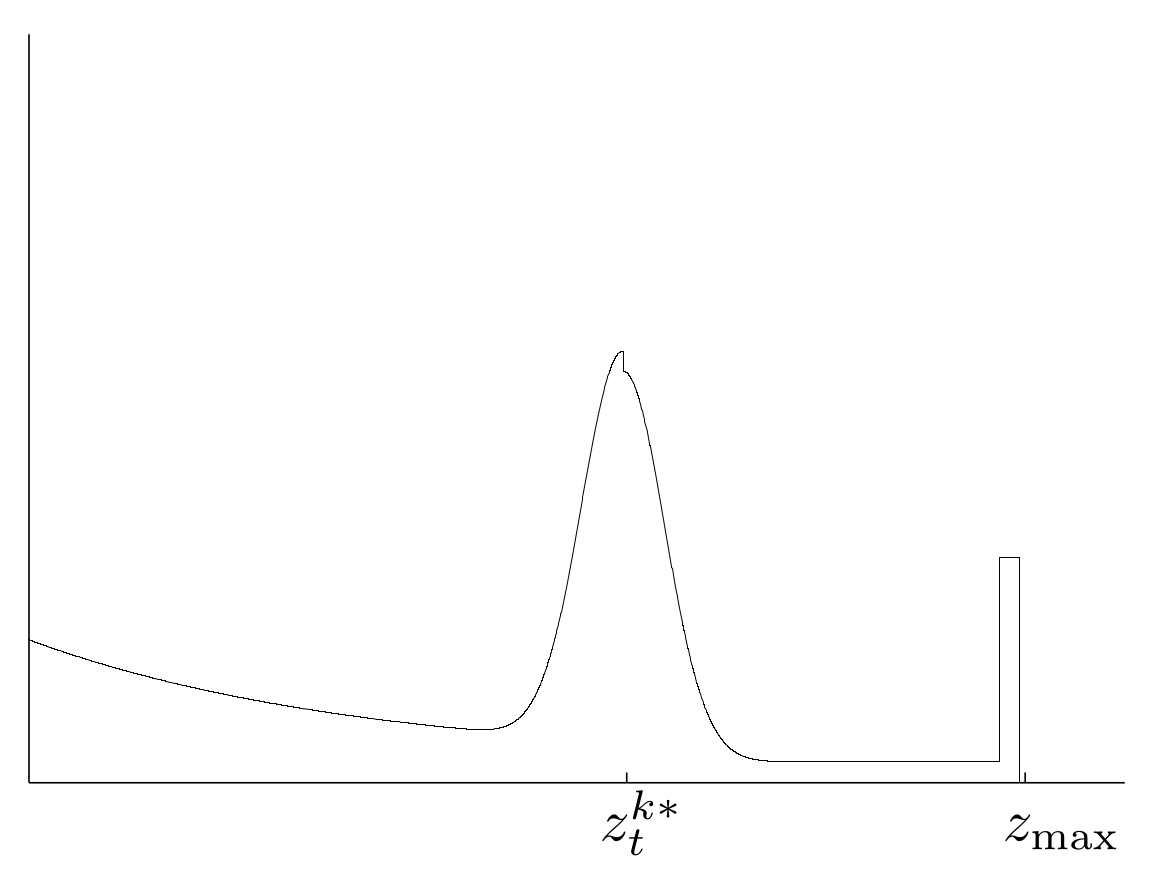
Gesamtverteilung
Die vier oberen Verteilung $p_\textrm{hit}, p_\textrm{short}, p_\textrm{max}$ und $p_\textrm{rand}$ werden nun in einem gewichteten Durchschnitt kombiniert. Dafür verwenden wir die Gewichte $z_\textrm{hit}, z_\textrm{short}, z_\textrm{max}$ und $z_\textrm{rand}$ mit $z_\textrm{hit}+z_\textrm{short}+z_\textrm{max}+z_\textrm{rand} = 1$.
$$p(z_t^k\mid x_t,m)= \left(\begin{array}{c} z_\textrm{hit}\\ z_\textrm{short}\\ z_\textrm{max}\\z_\textrm{rand}\end{array} \right)^T\cdot\left(\begin{array}{c} p_\mathrm{hit}(z_t^k\mid x_t,m)\\ p_\mathrm{short}(z_t^k\mid x_t,m)\\ p_\mathrm{max}(z_t^k\mid x_t,m)\\ p_\mathrm{rand}(z_t^k\mid x_t,m)\end{array} \right)$$Beispiel Gesamtverteilung
Algorithmus
1def beam_range_finder_model(z_t, x_t, m, z_hit, z_short, z_max, z_rand, p_hit, p_short, p_max, p_rand, ray_cast):
2 q = 1
3 for k in range(len(z_t)):
4 z_t_k_star = ray_cast(x_t, m, k)
5 p = z_hit * p_hit(z_t[k], x_t, m) + z_short * p_short(z_t[k], x_t, m) + z_max * p_max(z_t[k], x_t, m) + z_rand * p_rand(z_t[k], x_t, m)
6 q *= p
7 return q
\begin{algorithm}
\caption{Entfernungsmessungmodel}
\begin{algorithmic}
\Input measurement $z_t$, pose $x_t$, map $m$
\Procedure{beam-range-finder-model}{$z_t,x_t,m$}
\State $q \gets 1$
\For{$k=1$ to $K$}
\State compute $z_t^{k*}$ for measurement $z_t^k$ using for example ray casting.
\State $p \gets z_\mathrm{hit}\cdot p_\mathrm{hit}(z_t^k\mid x_t,m) + z_\mathrm{short}\cdot p_\mathrm{short}(z_t^k\mid x_t,m) + z_\mathrm{max}\cdot p_\mathrm{max}(z_t^k\mid x_t,m) + z_\mathrm{rand}\cdot p_\mathrm{rand}(z_t^k\mid x_t,m)$
\State $q \gets q\cdot p$
\EndFor
\return $q$
\EndProcedure
\end{algorithmic}
\end{algorithm}
Parametrisierung
Sei $\Theta$ die Menge der roboterspezifischen Parameter, also die Geweichte $z_\textrm{hit}, z_\textrm{short}, z_\textrm{max}$, $z_\textrm{rand}$ und die Parameter der Verteilungen $\sigma_\mathrm{hit}$ und $\lambda_\mathrm{short}$. Kann durch einen Maximum-Likelihood-Methode aus Daten geschätzt werden.
Tipps
- Anstatt jeden Winkel zu messen kann es manchmal besser sein nur 8 mal in 45° Abstand zu messen. So hat man weniger zu rechnen und die einzelnen Messungen sind unabhängiger voneinander.
Probleme
- Fehlende Glätte der Umgebung wenn viele kleine Objekte gemessen werden. Also die Funktion $p(z_t^k\mid x_t, m)$ ist sehr unstetig. Schwer zu approximieren.
- Hoher Rechenaufwand, da für jede Messung eine ray casting gemacht werden muss.