Exploration (Robotik)
Einfache Sprache
Ziel der Exploration ist
- das aktive Sammeln von Information der Umgebung,
- das Entscheiden, was ist das nächste (optimale) Ziel ist und
- die Unsicherheit zu minimieren.
Einzelneren Roboter
Für einen einzelnen Roboter kann Exploration z.B. bedeuten, dass gezielt Grenzen angesteuert werden, wobei eine Grenze als der Übergang von freiem Raum und unbekanntem Raum ist. Der Punkt der genau angesteuert wird, sollte die Kostenfunktion minimieren, die Reisezeit, Distanz, Energieaufwand, etc. minimiert. So z.B. folgendes Bild, in dem die Grenzen rot gestrichelt sind, der freie Raum weiß, der blockierte Raum schwarz und der unbekannte Raum grau ist. 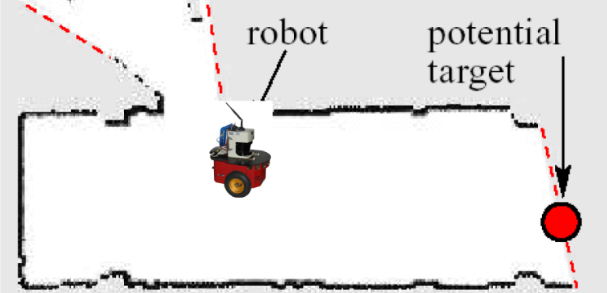
Mehrere Roboter
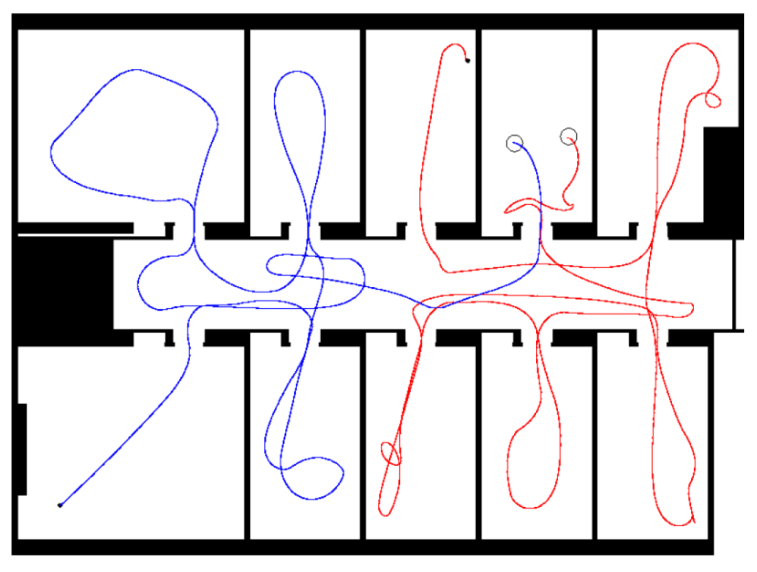
Keine Koordination
Bei Keine Koordination der Exploration löst jeder Roboter das Problem als Einzelneren Roboter.
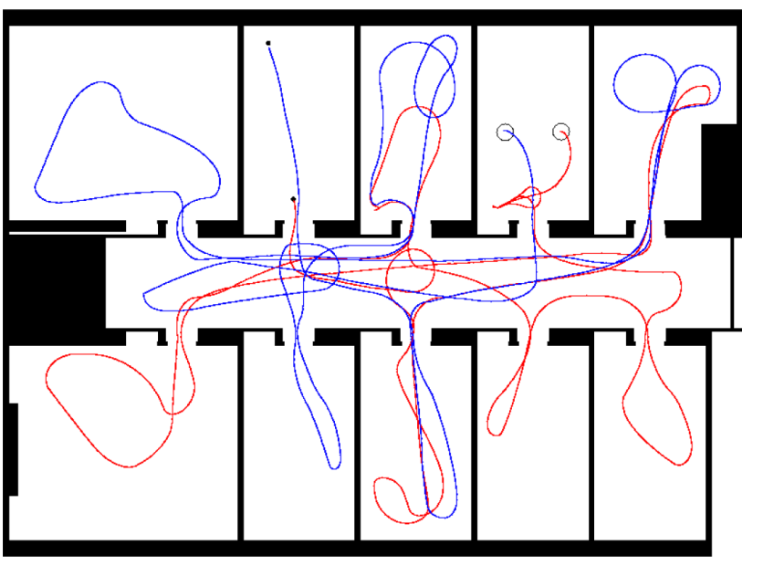
Implizite Koordination
Bei der Implizite Koordination der Exploration teilen sich die Roboter eine Karte. Die Kartierung erfolgt zentral, also einheitlich für alle Roboter. Die Entscheidung über die Exploration wird aber dezentral durch jeden Roboter selbst getroffen, also Was, Wo als nächstes erkundet werden soll.
Explizite Koordination
Bei der Explizite Koordination der Exploration teilen sich die Roboter eine Karte. Die Kartierung erfolgt zentral, also einheitlich für alle Roboter. Die Entscheidung über die Exploration wird auch zentral getroffen, also welcher Roboter Wo als nächstes erkundet soll.