GraphSLAM
Einfache Sprache
GraphSLAM löst SLAM indem der Zustand nicht nur die Roboterpose sonder auch die Landmarks enthält. Dabei wird das Gauß-Newton-Verfahren angewendet, um den Abweichung zwischen Zustand und Wahrnehmung zu minimieren.
Aufbau
Grundlagen
Beim GraphSLAM wird das Problem als Graph dargestellt. Jeder Knoten stellt eine Roboterpose während der Kartierung dar. Jede Kante stellt eine räumlichen Zusammenhang zwischen zwei Roboterposen dar. Ziel ist es die Knoten so zu korrigieren, das die wahrscheinlichste Karte entsteht.
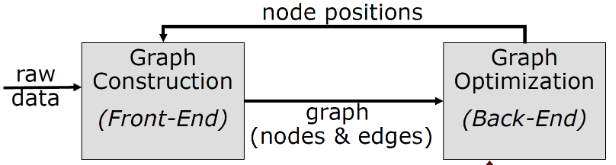
Zur Lösung wird das Problem in zwei Teile geteilt:
- Front-End: Graphkonstruktion und
- Back-End: Graphoptimierung.
Front-End
Back-End
Nutzen Methode der kleinsten Quadrate, da wir mehr Unbekannte als Gleichungen haben.