Roboterpose
Einfache Sprache
Die Roboterpose setzt sich aus der Roboterort (meist Koordinaten) und Roboterkonfiguration zusammen.
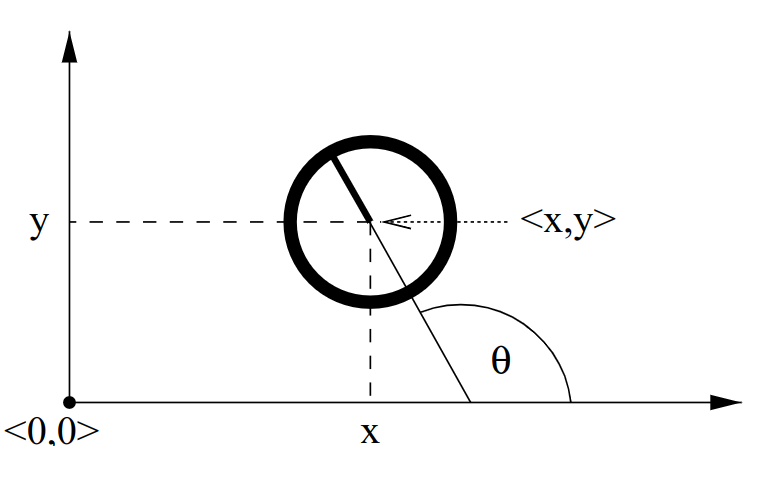
Beispiel 2D Roboterpose
Das Bild zeigt eine Roboterpose im 2-Dimensionalen Raum bestehende aus dem Vektor $\mathfrak p = \left( \begin{array}{c} x\\ y\\ \theta \end{array} \right)$.
Def. Roboter Pose